21点游戏2026中国最新手机版app下载 一语气入选ICRA最好论文, RoboScience机器科学怎样冲破具身智能瓶颈


剪辑|Sia
在具身智能最难的泛化问题上,他们一语气拿出顶会级后果,并把它们千里淀进其改进 VLOA 大模子,推动机器东说念主迈向普遍施行。
6 月 1 日至 5 日,机器东说念主领域顶级会议 ICRA 2026 在奥地利维也纳举行。RoboScience 机器科学首席科学家、新加坡国立大学助理教训邵林团队的论文 《Bi-Adapt: Few-Shot Bimanual Adaptation for Novel Categories of 3D Objects via Semantic Correspondence》入围机器东说念主操作与通顺标的(Robot Manipulation and Locomotion)最好论文奖提名(Finalist) 。同期入围该奖项提名的,还包括来自伯克利大学、斯坦福大学、麻省理工学院、清华大学等大家顶级高校的筹商团队。
这一经不是邵林团队第一次站上 ICRA 的高光位置。客岁 ICRA 2025 ,团队曾凭借通用贤慧持取框架 D(R,O) Grasp 从四千多篇投稿中脱颖而出,斩获机器东说念主操作与通顺标的最好论文奖( Winner ),成为近五年来亚洲机构初度以第一单元身份获此盛誉的团队。
而在 ICRA 2026 论文请托收尾中,邵林指导的团队共有 10 篇筹商后果得胜入选。这些论文聚焦贤慧持取、外交导航、低成本力感知与羼杂任务经营等中枢标的,系统性地鼓舞了具身智能的时期畛域。
从 2025 年获奖,到 2026 年再度入围,邵林团队也成为近五年来亚洲惟逐一语气两年获取该标的最好论文奖项认同的团队。这一收成不仅体现其在机器东说念主操作领域的延续改进智力,也进一步突显中国具身智能企业在海外顶级学术舞台上的时期影响力。
但比较奖项自己,这两篇论文更值得温存的场所在于它们共同指向了具身智能走向实在全国前必须跨过的门槛:泛化操作智力。
Bi-Adapt:
一种用于高效学习通用双手操作的新式框架
对机器东说念主来说,双臂操作远比单臂持取复杂得多。两只手不仅要诀别判断战争点和作为标的,还必须相互配合。传统处置决议要么针对不同物体东说念主工想象作为,要么依赖大畛域数据,通过多半示范或交互巡逻模子。但前者难以袒护实在全国复杂多变的几何结构,后者意味着腾贵的数据收罗和巡逻成本。
Bi-Adapt 的中枢冲破在于:机器东说念主能将一经学会的双臂操作训戒迁徙到没见过的新物体类别上,况且只需要小数试错,就能在仿真和实在环境中保持较高得胜率。
Bi-Adapt ,一种用于高效学习通用双臂操作的新框架。
仿真测试显现,Bi-Adapt 在五类新类别双臂操作任务上的得胜率达到 59%—70%,显耀杰出多个基线方法。
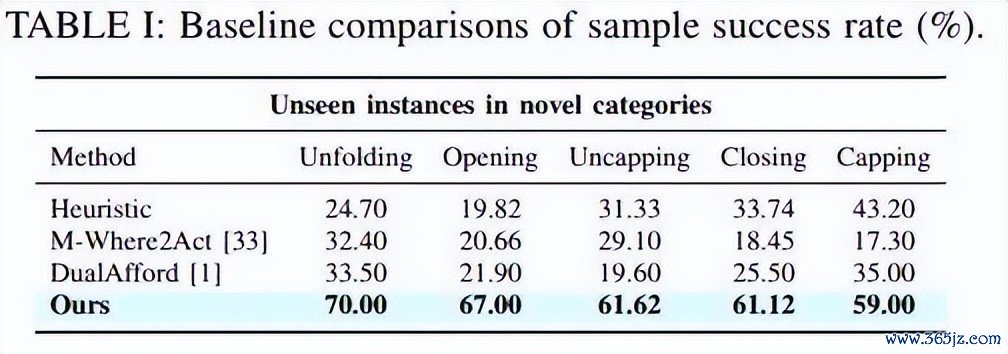
仿真测试收尾显现Bi-Adapt 在五类双臂任务上均显耀杰出启发式规矩、M-Where2Act、DualAfford 等基线方法。
在实在机器东说念主实验中,它也完成了伸开、掀开、取盖等任务,考据了跨类别操作智力从仿真到实在环境的可迁徙性。
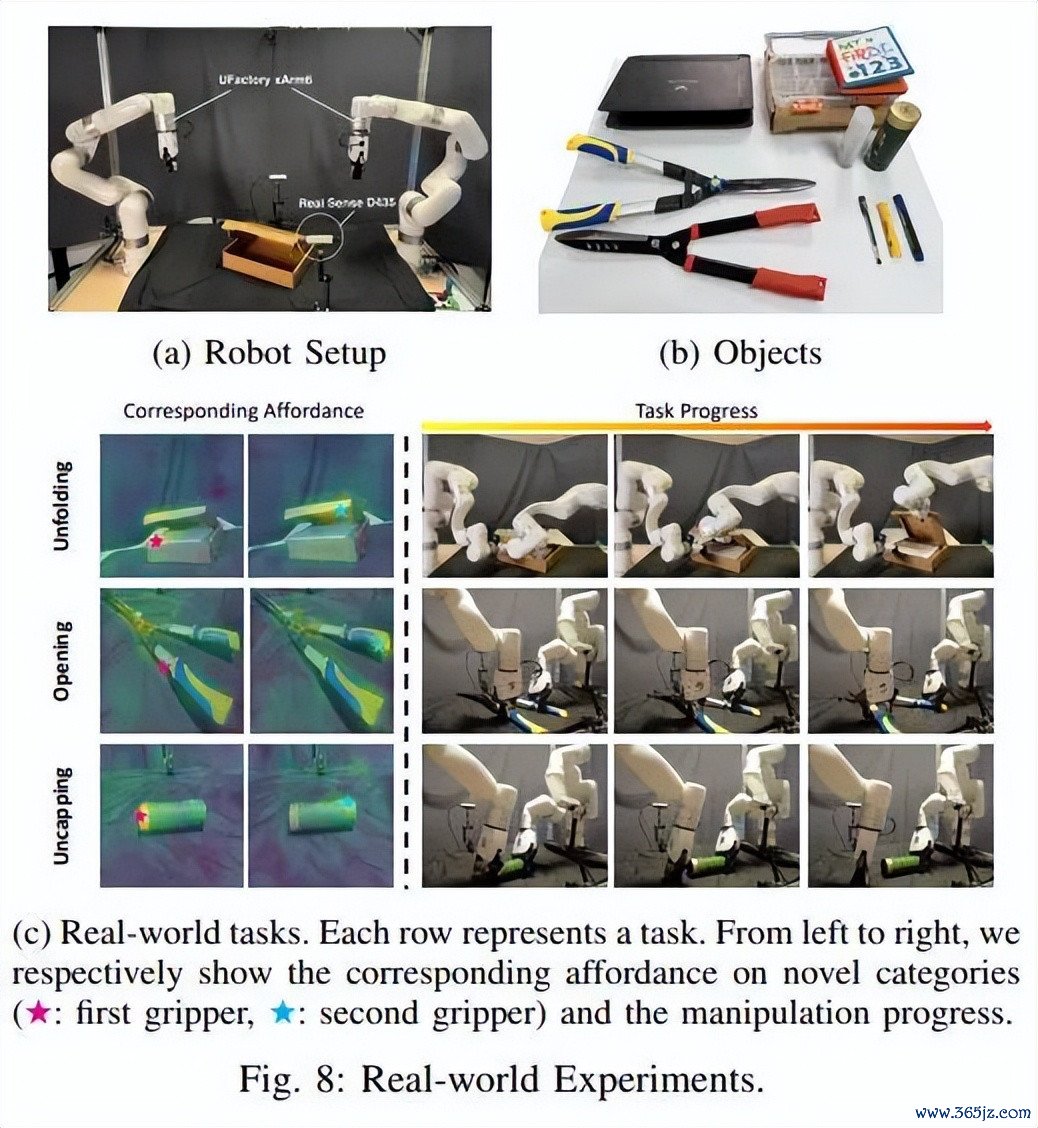
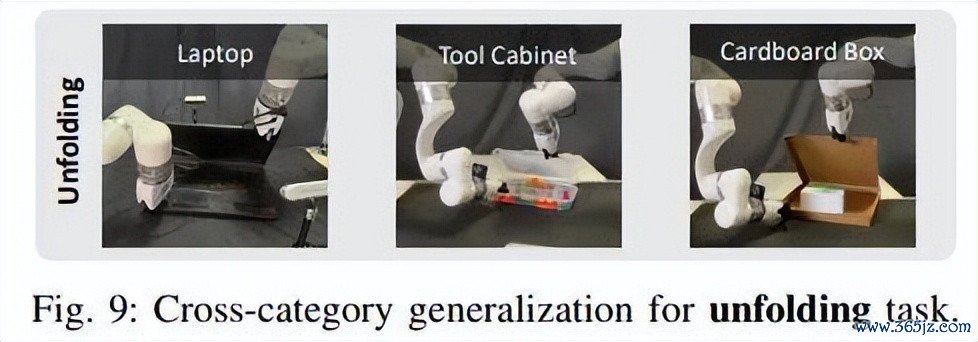
实在机器东说念主考据。
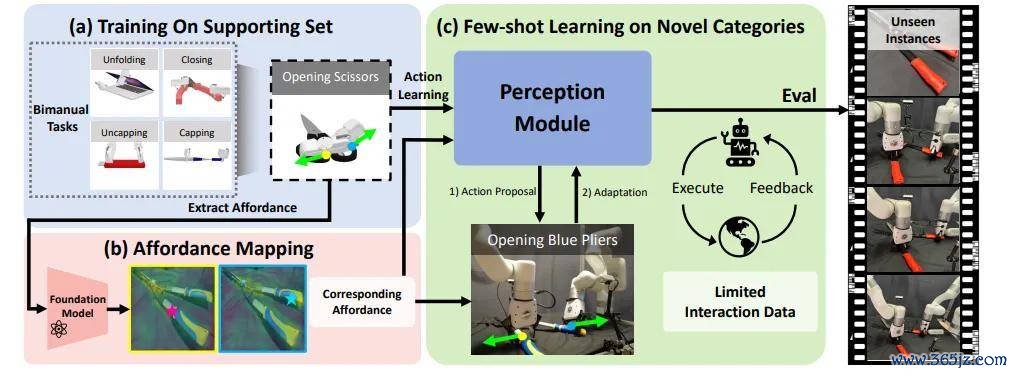
通俗来说,Bi-Adapt 把跨类别双臂操作变成了三步曲:先找对位置,再学会配合,临了用小数试错修正。
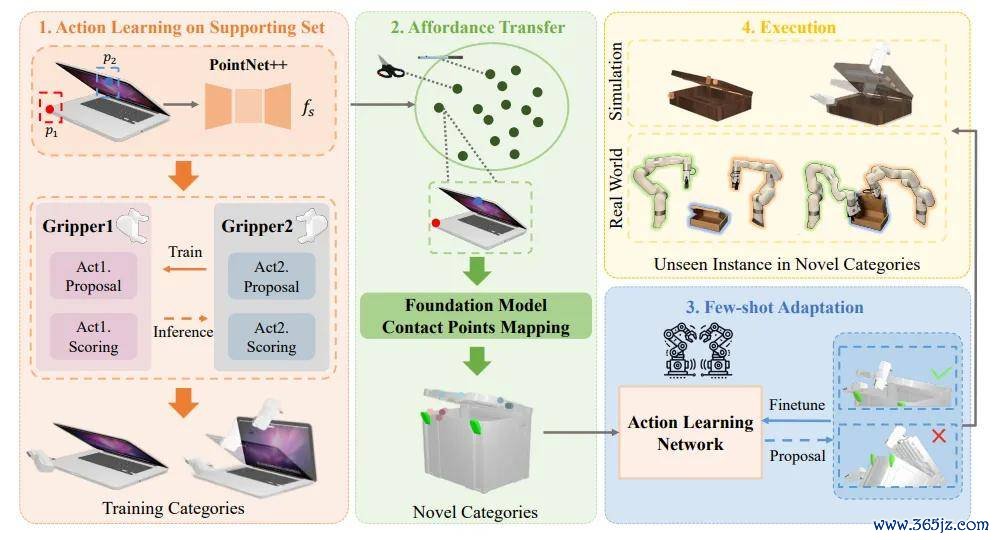
Bi-Adaptpipeline 主要包括作为学习、可供性迁徙、少样本适配和最终推行四个阶段。
第一步,是在已知类别上训诫「操作训戒库」。系统会记载得胜操作时,两只夹爪诀别战争那里、以什么标的通顺、怎样协同发力。
这里有一个要害想象:Bi-Adapt 莫得把两只手当成两个独处推行器,而是把双臂作为拆成两个相互依赖的模块。
与推理不同,巡逻时取舍了反向数据流:先巡逻第二只夹爪在不同第一手作为下怎样协同,再巡逻第一只夹爪学会建议更有益于举座团结的作为,让第一只手学会为第二只手创造配合条目。
第二步,是用视觉基础模子作念跨类别语义对应。
机器东说念主固然莫得见过钳子,但要是学过怎样操作剪刀,就不错借助视觉基础模子判断:剪刀上的得胜战争点,在钳子上最可能对应那里。
论文中使用了 DIFT,也即是 diffusion feature,从扩散模子中索取图像特征,并比较源图像战争点与目的图像各个像素之间的相同度。相同度最高的位置,就被视为新物体上的候选战争点。
第三步,少样本交互适配。
视觉上的相同并不等于物理上一定可操作,因此机器东说念主会拿候选战争点推行小数尝试,字据得胜或失败响应微调模子,过滤掉造作战争点,修正两只夹爪的作为标的。
临了,最终的放弃战术被部署于全新类别的未知实例上。
要是说 Bi-Adapt 试图处置「不同物体怎样操作」,那么ICRA 2025 获奖的 D(R,O) Grasp 搪塞的是另一个泛化挑战:不同贤慧手之间怎样复用褪色套持取智力。
通过将机器东说念主手和物体都示意成点云,学习二者在踏实持取时应该酿成的空间距离联系,D(R,O) Grasp冲破了传统「一机一策」的局限——基于这一长入示意,一个 AI 模子即可撑持 LeapHand、Shadow Lite、XHand、SoftHand 等多种贤慧手,袒护 3/4/5 指、软体与硬质等不同方式,完成复杂持取操作。
两项顶会级责任放在沿路,组成了邵林团队近两年的时期干线:机器东说念主操作智力不应该绑定单一硬件、单一物体或单一场景,而应该从容千里淀为可复用、可迁徙的通用智力。
顶会神技「并网」到通器具身大脑 VLOA
邵林曾指出,具身智能大模子不行通俗照搬 CV 或 NLP 的 scaling 训戒。图像和文本自然领有相对长入的数据局势,但机器东说念主操作面对的是任务、物体和机器东说念主骨子三重万般性,若莫得长入的数据局势,21点游戏2026中国最新手机版app下载这些数据很难被纳入褪色体系学习,模子也很难酿成实在可迁徙的操作智力。这亦然现存 VLA 路子靠近的中枢瓶颈。
RoboScience 机器科学建议的 VLOA(Vision-Language-Object-Action)路子,恰是为了处置这一问题。比较径直从 Vision-Language 跳到 Action,VLOA 在中间引入了 Object,也就所以物体为中心的情景变化示意——
不管是提起杯子、掀开盒盖,照旧插入零件,最终都不错被描写为物体在三维空间中的位置、姿态和方式变化。Object Trajectory (物体 3D 一语气点云轨迹)恰是对这种变化的长入抒发。
基于这一想考,邵林团队搭建了一个「具身全国模子 + 通用操作模子」的双引擎架构,调换「任性机器东说念主操作任性对象、完成任性任务」。
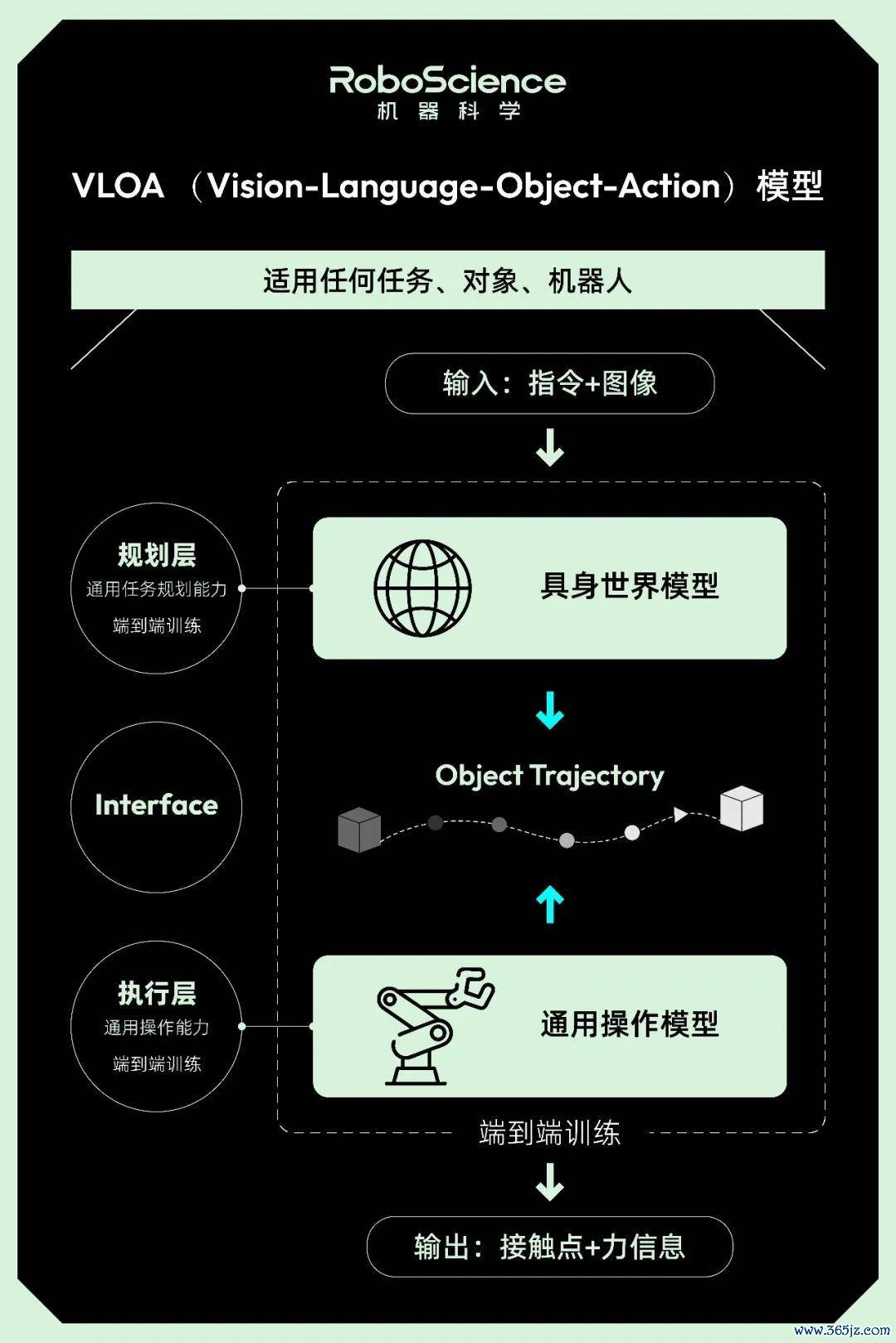
RoboScience机器科学建议的 VLOA(Vision-Language-Object-Action)框架,一个双引擎架构。
在这一框架中,表层具身全国模子庄重理奉命务语义,预演物体在三维空间中的情景变化,也即是 object trajectory。它更多从互联网视频、明白书、多模态数据中学习语义和学问。
基层通用操作模子庄重把 object trajectory 转成具体机器东说念主的作为。它学习的是物理规章、战争、力、顾问和放弃,不错通过公司自研的物理引擎和仿真数据大畛域巡逻。
诱骗它们的灵魂纽带即是 Object Trajectory(物体 3D 一语气点云轨迹) 接口。有了这一中间示意,不同起原的数据才能被长入纳入褪色体系,犹如海纳百川。
2026世界杯滚球中国官网这一框架的智力,也一经在实在任务中得到考据。2025 年 5 月,RoboScience基于 VLOA 大模子完成了大家范围内复杂度、精度和设施数都极高的具身操作任务拼居品。

基于 VLOA 大模子完成拼居品东说念主物,一镜到底。
这类任务锻真金不怕火的不是某一个单项「神技」,而是模子能否把一系列散布智力有用整合起来,在复杂物理环境中完成踏实、细腻、连贯的操作。
也恰是在这个配景下,Bi-Adapt 和D(R,O) Grasp 的价值不啻于顶会论文,而是在为 VLOA 补皆要害底层智力——跨类别操作泛化、一个模子适配多种终局推行器。这一系列筹商后果的落地,将显耀裁汰机器东说念主操作技巧的学习成本与部署门槛,推动具身智能开脱遥控器和预设技巧库,自主贯通全国,并在实在物理环境中踏实推行任务。
不错说,交融了全国模子的 VLA,也即是VLOA 路子,正成为具身智能迈向实在场景的一种更优解。
斯坦福学术 × 硅谷工程:
RoboScience 机器科学的双重底座
RoboScience 机器科学训诫于 2024 年 12 月,是一家聚焦通器具身智能的大家伊始企业,由前苹果 AI 平台时期庄重东说念主、斯坦福大学 AI Lab 硕士郊外,与新加坡国立大学助理教训、斯坦福大学 AI Lab 博士邵林皆集创立。

邵林(左)和郊外(右)
这组创举东说念主搭配,恰恰对应了RoboScience 机器科学的时期路子:一端是机器东说念主操作、贤慧手、跨骨子持取与仿真等标的的前沿学术积蓄,另一端则是大畛域 AI 基础设施和工程系统的落地训戒。
邵林本科毕业于南京大学,斯坦福大学博士,师从机器东说念主学习领域学者 Jeannette Bohg,皆集导师为好意思国三院院士 Leonidas J. Guibas,恒久深耕机器东说念主操作、贤慧手、跨骨子持取与仿真等标的。值得一提的是,邵林与 Hillbot 创举东说念主苏昊、星河通用创举东说念主王鹤、穹彻智能创举东说念主卢策吾等同属斯坦福机器东说念主与 AI 学术谱系,其中与王鹤为同届,苏昊、卢策吾为其师弟。
郊外本科毕业于中科大物理系,后插足斯坦福大学 AI Lab 攻读硕士,师从「AI 布说念者」吴恩达。他曾在苹果担任 AI Platform 时期庄重东说念主,主导打造了「苹果的 PyTorch 与 CUDA」中枢平台,推动多项要害 AI 时期在苹果生态中大畛域落地。
现在,公司已在机器东说念主骨子、终局推行器、多模态物理仿真等要害要道终了全栈布局,但愿通过软硬一体路子,加快具身智能时期畛域化落地。
自研的高精度通用物理仿真平台 「RoboMirage」
RoboScience 机器科学已获取京东集团、商汤科技、达晨财智、招商局创投、零一创投、普华本钱等多家 CVC 和财务机构的投资及产业撑持,近期又获取了多家国表里产业龙头、互联网大厂、头部财务机构等多轮注资,并在北京、深圳、苏州、杭州设有研发和出产中心。团队成员来自斯坦福、中科大、新加坡国立大学等顶尖高校,以及苹果、字节、腾讯、大疆等头部科技企业。
在产业化方面,公司已与多家零卖、物流、康养劳动企业,以及机器东说念主骨子、贤慧手公司开展试点合作,并筹备于本年终了面向工业与营业场景的挨次化机器东说念主骨子产品量产。
跟着机器东说念主插足零卖、物流、工业、家庭等实在场景,实在的竞争也将从单点演示转向通用操作智力、数据闭环和系统工程智力。在这一瞥业拐点上,从顶会论文到工程系统,从泛化算法到实在机器东说念主出产力,RoboScience 机器科学正试图买通具身智能从「学术顶尖」走向「畛域化落地」的要害链路。在这场通往物理全国的万亿级长跑中,他们不仅在探索机器的畛域,更在实在全国中加快昔时的到来
参考诱骗21点游戏2026中国最新手机版app下载